(文/程文智)据高工机器人产业研究所(GGII)预测,2024年全球人形机器人市场规模为10.17亿美元,到2030年将增长至150亿美元,2024-2030年CAGR将超过56%,全球人形机器人销量将从1.19万台增长至60.57万台。其中,预测2024年中国人形机器人市场规模约为21.58亿元,2030年有望突破380亿元,销量将从0.4万台增长至27.12万台。
 图:全球人形机器人市场空间测算(数据来源:GGII)
图:全球人形机器人市场空间测算(数据来源:GGII)
近年来,随着政策的不断出台,加上资本的持续涌入,人形机器人产业链得到不断壮大和完善,加速了人形机器人在工业、商业,以及家庭等不同场景下的应用落地。业界普遍认为2024年将会是人形机器人产业化元年。而人形机器人需要使用大量传感器感知外部环境和自身状态,并调整运控规划,其中就包括力/力矩传感器、IMU、视觉传感器、触觉传感器和声学传感器等。本文将重点介绍技术壁垒高,目前玩家还不多的六维力/力矩传感器,看看目前市场格局及国产化进展情况。
六维力/力矩传感器测量原理及技术壁垒
力传感器是一种测量力的大小和方向的传感器,其原理是利用弹性体的弹性变形特性来测量物体受到的力和力矩。当物体受到外力作用时,传感器的弹性体会发生变形,变形程度与受力大小和方向有关。应变片则用于检测弹性体的应变情况,将应变转化为电信号输出。电桥则将应变片的信号转化为电信号,通过信号调理器进行放大、滤波、线性化等处理后,输出对应的力和力矩的电信号。
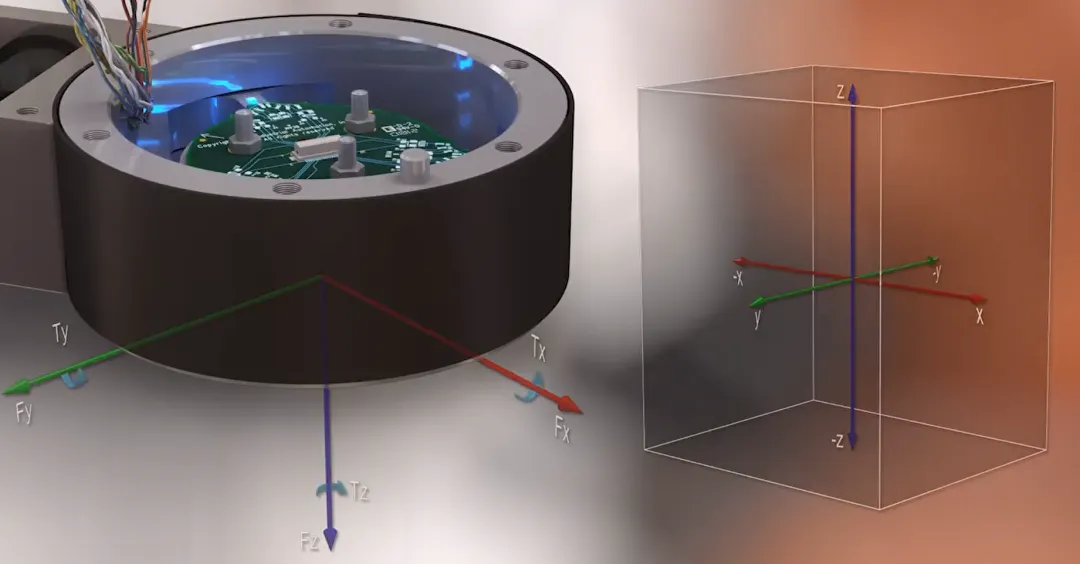
根据不同的维度,可分为一维、三维和六维力传感器。其中,六维力传感器除了能够测量三个方向的力之外,还能够测量旋转的力矩。也就是说,六维力/力矩传感器能够同时检测三维空间的力/力矩信息,即实现空间三维力(Fx、Fy、Fz)和三维力矩(Mx、My、Mz)的获取。
 图:六维力传感器测量原理(来源:ATI官网,芯查查)
图:六维力传感器测量原理(来源:ATI官网,芯查查)
在人形机器人中,六维力/力矩传感器可搭载在手腕、脚踝、灵巧手等关键部位,以感知自身的重量,及与外界的交互,实现高精度力控、摆动稳定控制和安全控制等功能,从而实现更加灵活自然的运动。比如,在双足机器人行走时,通过六维力传感器测量脚踝处的力和力矩,以便进行姿态调整。此外,微力传感器还可安装在人形机器人的手腕上,助力精细操作,比如抓取、装配和缝纫等。
图:六维力传感器主要技术壁垒(来源:蓝点触控)
不过六维力传感器的技术壁垒相对较高,主要体现在结构设计、标定过程、动态性能优化算法,以及多维力传感器的解耦算法四个方面。
首先,结构设计需要尽可能减少不同维度之间的耦合。
其次是标定过程,标定主要是为了获得六维力传感器内部算法的各个参数,建立传感器原始信号和受力之间的映射关系。因此,标定工作在传感器的研发过程中扮演着重要角色,目前采用六维力联合加载标定,才能实现准度更高,串扰更低。据悉,每一个新产品都需要重新标定。
还有,动态性能优化算法需要改进以识别快速变化的力信号,如机器人打磨抛光时的接触力,物体高速运动过程中的称重等,当前业界主要使用优化自身结构、形状等方法提高动态性能,国内外学者还尝试利用动态补偿滤波器、遗传算法、神经网络算法等智能算法来提高传感器的动态性能。
最后需要解决多维力传感器间的耦合误差,通过解耦算法消除干扰,提高测量精度。
六维力/力矩传感器国产化进展
六维力/力矩传感器目前还没有形成明显的规模效应,价格普遍较高。据公开资料显示,海外厂商,比如ATI的六维力传感器产品超过10万元一个,国产六维力传感器的单价也在1万至6万元之间。
随着人形机器人的热度越来越高,近年来国内入局者也在逐年增加,但受限于该领域的高技术壁垒,国产六维力传感器在灵敏度、串扰、抗过载能力,以及维间耦合误差等方面仍存在差距。
在市场格局方面,目前主要分为欧美品牌、日韩品牌,以及国产品牌三大阵营。在上世纪七十年代初期,美国、日本等国家就已经率先研发出了六维力传感器,目前ATI的产品精度可以做到0.5%。
这几年,国内企业和科研机构也在加速研发,据公开信息显示,坤维科技的产品精度也能做到0.5%,不过大部分国内厂商的产品精度在1%~3%区间。
在韩国,六维力传感器主要厂商有Robotous、Aidin Robotics,其主要合作厂商为Doosan Robotics、Neuromeka 和 Rainbow Robotics;在日本,主要六维力传感器的主要供应商有Sintokogio和WACOH-TECH,其主要合作伙伴包括发那科、电装、三菱、安川及NACHI等;在欧美地区,有两类厂商提供六维力传感器产品,一类是传统的传感器厂商,比如ATI、Bota Systems AG、ME-Meßsysteme GmbH、AMTl、Kistler等,另一类是机器人末端工具生厂商,比如SCHUNK、OnRobot、Robotiq等,欧美地区的厂商合作企业以协作机器人本体厂商为主;国内的主要供应商有坤维科技、宇立仪器、蓝点触控、鑫精诚传感器、神源生智能、海伯森、瑞尔特测控等厂商已经有相关产品落地,而昊志机电、柯力传感、埃力智能等在也布局。
图:中国市场六维力传感器厂商梯队分布(来源:MIR睿工业)
根据MIR的划分,国内六维力传感器市场可以分为三个梯队,其中第一梯队的厂商为ATI、宇立仪器、蓝点触控、坤维科技;第二梯队为鑫精诚、海伯森、柯力传感、瑞尔特;第三梯队为神源生智能、昊志机电、鲁班机器人,以及埃力智能等。
结语
近年来,研究者们在六维力传感器的设计上取得了显著进展。例如,一种新型高精度六维力传感器通过理论分析、有限元模拟与模拟实验等方法进行优化,提出了基于深入分析传感器性能随几何参数变化规律后的结构优化方案。
新型并联式六维力传感器的研究也取得了重要进展。该传感器的结构特点和测量原理得到了详细介绍,并建立了数学模型,推导出传感器的线性度和重复性指标,用于评价其静态性能。
六维力/力矩传感器的最新技术进展主要集中在提高灵敏度、量程、刚度、解耦能力,以及集成化和无线化等方面。随着市场需求的增加,其技术与成本将会得到进一步的优化。

全部评论