余震恰逢原厂缺货期,固态硬盘或迎新一轮涨价
今日凌晨,中国台湾东部的花莲县连续发生地震,最高强度为6.3级,震源深度10公里,据中国地震台网分析,本次地震均为4月3日台湾花莲县海域发生的7.3级地震的余震。中国台湾地区在全球半导体供应链中扮演者重要角色,其10nm以下先进制程供应全球占比高达69%。地震带来的重创使得本地存储芯片厂商必须停工检修、调试设备,从而影响出货,不少厂商都向客户发出了涨价通知。而此次余震,可能会再次影响本地芯片厂商们刚从上次地震中恢复的存储产能,让行业迎来新一轮涨价…… 在过去两年,全球的存储厂商都经历了“至暗时刻”——成本上涨、降价、库存积压,导致强如三星、SK海力士等都遭受巨大损失。亏损的结果之一便是各大存储原厂减少了资本投入,纷纷缩减产能,而当紧缩的产能难以应对持续上涨的需求时,涨价便难以避免。 存储行业具有较强的周期性,波动周期约3~4年,这一轮价格波动也是存储行业周期性的具体表现。根据WSTS数据,从2004年至今,全球存储芯片产业共经历了5轮周期,目前正处于第6轮周期起点。从市场规模增速来看,2006年、2010年、2014年、2017年和2021年均出现了增速峰值,分别为20.6%、55.4%、18.2%、61.5%以及28.8%。影响历史上周期上行主要驱动因素有终端销量爆发、新技术投入应用,晶圆厂合并、减产、产能不足等因素。下行的因素包括产能过剩、国际经济形势影响及需求疲软等。 现在新一轮的存储行业上行周期,来了。 原厂、大厂,接连涨价! 存储市场的上行周期在2024年到来,研究机构Gartner此前报告指出,存储芯片需求在2024年将强劲复苏,营收预估将暴增66.3%。预测很快成为了现实,众多存储界“大佬”都宣布了涨价: 三星:据BusinessKorea的报道,三星拟在第二季度上调企业级SSD价格20%-25%,旨在扭转自2023年以来的下跌趋势。最初,三星计划较上一季度提价约15%。但由于需求高于预期,三星决定扩大提价幅度。 美光:4月9日,据台媒报道,市场消息人士透露,半导体巨头美光已向多数客户提出调升第二季度产品报价的计划,涨幅高达超过20%。 西部数据:4月10日,西部数据表示,旗下的机械硬盘(HDD)和固态硬盘(SSD)都出现了供应短缺。而且闪存产品的需求也超出了预期,因此本季度将继续调整闪存和硬盘产品的价格,其中一些变动将立即生效。 希捷:机械硬盘大厂希捷科技近日也向客户发出涨价函,宣布将对新订单和超出先前承诺数量的需求立即进行涨价。 2024年伊始,NAND闪存价格开启持续上涨,第一季度整体上涨23-28%,第二季度预计还会上涨13-18%,反映到终端SSD市场,部分产品甚至已经价格翻倍。此外,过去两周,业界频繁传出企业级SSD面临短缺的消息,TrendForce认为,受益于北美和中国通信服务提供商不断增长的需求,预计今年上半年企业级SSD采购量将环比增长。 除了供应方,需求方对存储芯片需求的增加也进一步将供需曲线推向了卖方市场,此前英伟达CEO黄仁勋在英伟达GTC 2024活动的媒体见面会上暗示,英伟达有意采购三星的HBM芯片。随后有韩媒爆料称,英伟达最快将从9月开始大量购买三星的闪存产品,将会给接下来三星电子的业绩带来更强的增长动力。 AI引领,企业级SSD需求强劲复苏 可以确定的是,2024年是存储行业复苏的转折之年。受疫情、经济不稳定等因素影响,全球消费电子市场经历了两年的下滑。随着人工智能的蓬勃发展,生成式AI的普及,AI技术在PC和手机的广泛应用,AI PC和AI手机也迎来了新一轮爆发,PC、智能手机等终端厂商预计将引来需求复苏,带动NAND Flash等存储的价格上涨。 此外,人工智能技术的快速发展也推动了对存储性能需求的爆发式增长。这一变化也将助力整个行业的转型升级。花旗分析师指出,SSD将成为AI的一部分,可能会取代HDD用于AI。因为SSD更适合AI训练应用,其速度较HDD快40倍。美国顶级科技公司的数据中心正在从HDD转向企业级SSD。这一趋势也极大地增加了对存储设备的需求,导致SSD供应紧张。 在需求量显著增加的当下,一些买家试图在下半年旺季之前增加库存水平,预计第二季度企业级SSD合同价格将上涨20%-25%。业界分析,受惠于北美及中国云端服务业者(CSP)需求上升,预期2024年上半年企业级SSD采购量将会逐季成长。预估今年第二季企业级SSD合约价季增20~25%,涨幅为全线产品最高。而在消费级SSD在第二季度预估增幅为10~15%。 从全球市场看,美、日、韩等企业在SSD领域具有不管是产能、生态还是销售体系都具有先发优势,国产化产品的市场份额较低。近年来,虽然本土厂商积极发力企业级 SSD,但由于SSD格局较为集中,几家国际存储巨头依然掌握较高话语权。因此,伴随着全球存储芯片价格的上涨和半导体供应链压力的持续加大,国产固态硬盘的成本也会被动跟随国际市场而水涨船高。 回顾近几年的存储行业发展,可以看到无论是因供需-价格周期、地震影响还是国际供应链的不稳定性,包括中国在内的全球各地的半导体企业,都经历了一系列严峻的考验。但这些也加大了中国的存储芯片制造商提供了改进工艺和创新的动力,以更好地适应一个不断变化的市场。希望中国台湾的半导体产业尽快从地震的创伤中恢复,也希望存储产业在新一轮上行周期中蓬勃发展。
存储
芯查查资讯 . 2024-04-23 1 5 1050
类比半导体发布超低功耗AFE90x系列芯片,革新动态心电监测技术
2024年4月23日,上海 - 致力于提供高品质芯片的国内优秀模拟及数模混合芯片设计商上海类比半导体技术有限公司(下称“类比半导体”或“类比”)今日正式推出其全新AFE90x系列生物电势模拟前端芯片,专为医疗诊断设备中的动态心电监测与Holter应用量身打造。该系列产品凭借超低功耗、多通道集成与卓越性能,旨在提升医疗设备的能效比与监测精准度,赋能更高效、便捷的心脏健康监测解决方案。 产品亮点: 多通道灵活配置:提供4、6、8通道可选,满足不同应用场景需求,实现全方位、高密度心电信号采集。 超低功耗运行:具备低功耗模式(0.33mW/通道)与超低功耗模式(0.29mW/通道),支持外部无源晶振,显著降低能耗,延长穿戴设备电池寿命。 卓越信号处理能力:输入偏置电流仅为50pA,输入参考噪声低至9μVPP(150Hz BW,G = 6),确保干电极应用下生物电势精确测量。 多种数据传输速率与高共模抑制:数据速率为62.5SPS至8kSPS,共模抑制比达到-105dB,确保数据传输效率与抗干扰性能。 全面合规与高级功能集成:支持包括AAMI EC11、EC13在内的多项国际医疗设备标准,内置右腿驱动放大器(RLD)、导联状态检测、威尔逊中心终端(WCT)、起搏检测(PACE)、测试信号等丰富功能,以及电压数模转换器(VDAC)、交流导联脱落激励源、数字软件起搏检测等高级特性。 优化系统设计:支持单极或双极电源配置,内置振荡器与高精度基准,采用SPI™-兼容串行接口实现菊花链连接,提供QFP64(10mm X 10mm)与BGA64(8mm X 8mm)两种封装选项,便于系统集成与小型化设计。 AFE90x系列的发布进一步壮大了类比半导体在生物电势专用芯片领域的阵容,继高端脑电系列AFE96x、监护仪产品AFE95x和AFE94x在国内外市场取得广泛认可后,该超低功耗新品将特别助力动态心电穿戴设备的发展。其超低偏置电流特性有助于提升干电极应用的信号质量,支持外部无源晶振则有助于整体系统功耗的降低。 获取样片与更多信息: 感兴趣的客户可通过电子邮件 sales@analogysemi.com 免费申请AFE90x系列芯片样片,体验其在动态心电监测领域的前沿技术优势。
类比半导体
类比半导体 . 2024-04-23 2 855
用于 GNSS的低功耗宽频带 LNA“NT1195”开始供货样品
日清纺微电子推出一款用于GNSS且具有业界最低※1消耗电流的低功耗、宽频带LNA(低噪声放大器)“NT1195”,并将从2024年4月23日开始供货样品。 在全球范围内发生的环境问题中有很多必须要解决的课题。其中降低功耗是一大主题。日清纺微电子专注于开发低功耗产品,为实现可持续发展的社会做出着贡献。 开始提供样品供货的“NT1195”在GNSS全频带(1164MHz~1610MHz)中实现了业界最低的消耗电流1.9mA,并且还实现了低NF及高增益特性。 此外,该产品采用了1.1x0.7mm的小尺寸封装,非常适合像智能手表和健康手环那样的可穿戴设备等小型且需要低消耗电流的应用。 ※1日清纺微电子于2024年4月23日调查的结果 产品名 NT1195FAAE2S 样品价格 (1,000个起购参考价格/含税※) 99日元 样品订购开始日 2024年 4月 23日 月产量 100万个 ※价格基于2024年4月的消费税率 产品特点 1. 同时实现低消耗电流和低噪声系数(NF)、高增益特性 通过我们多年培育的独特技术,实现了1.9mA的超低消耗电流和0.7dB的低噪声系数(NF)以及18dB的高增益特性。 与本公司以往的LNA产品相比,消耗电流减少了60%以上,可以延长配备本产品的可穿戴设备等要求低消耗电流终端设备的电池驱动时间。 另外,其低噪声系数(NF)及高增益特性有助于提高终端的接收灵敏度。 2. 支持GNSS多频段及采用小型封装 本产品是一款支持 GNSS 多频段的 LNA,使用相同的外部电路实现了GNSS 全频带(1164MHz 至 1610MHz)下的低噪声系数(NF)及平坦的高增益特性。根据搭载终端的配置要求,本产品可以灵活应对。(参见下面的框图1和框图2) 另外,仅使用本产品就可以应对GNSS全频带,因此有助于减少采用部件的数量和缩小实装面积。 图1 图2 产品图片 0.7×1.1×0.37mm <EPFFP-6-FA封装> 主要性能指标(详情请参阅产品数据表) 项目 NT1195FAAE2S 封装 0.7 x 1.1 x 0.37 mm 电源电压 1.5 V ~ 3.7 V (1.8 V typ.) 工作电流(消耗电流) 1.9 mA Typ. 支持频率 1164 MHz ~ 1610 MHz 小信号增益(Gain) 17.5 dB Typ. @ L1频段 18.0 dB Typ. @ L2/L5/L6频段 噪声系数(NF) 0.75 dB Typ. @ L1频段 0.70 dB Typ. @ L2/L5/L6频段 预想应用 智能手表等可穿戴设备 GNSS模块 各种跟踪定位器 移动终端 无人机
GNSS
Nisshinbo(日清纺) . 2024-04-23 1 1 820
股价暴跌近50%!投资者敦促Wolfspeed审查战略,或被迫出售
4月23日,外媒报道,激进投资者Jana Partners周一在给Wolfspeed董事会的一封信中透露 ,正在敦促全球 Wolfspeed探索一切提高股东价值的方法,包括潜在的出售。 Jana 拥有 Wolfspeed 的“大量”股份,她在信中写道,对于这家拥有 37 年历史、市值 28 亿美元的公司来说,现在是时候寻求“提高Wolfspeed业绩的所有途径”并开始“对战略选择的全面审查”。因为管理层在资本配置、执行和战略方面的失误导致股价低迷。 信中表示:“这种对替代方案的探索可能会发现多种突显和实现价值的方法,包括通过出售。” Wolfspeed 代表没有立即回应置评请求。 Wolfspeed 总部位于达勒姆,推出碳化硅,这是一种用于从电动汽车到电网系统等各种应用的下一代半导体材料。该公司高管表示,作为新技术的领导者,该公司拥有一个利基市场。 但 Roth Capital Partners 董事总经理兼高级研究分析师克雷格·欧文 (Craig Irwin) 表示,他对激进股东报告并不感到惊讶,因为 Wolfspeed 的股票最近没有受到关注。“这些通常是耐心的投资者,但即使是病人现在也变得不耐烦了,”他说。虽然 Irwin 同意 Wolfspeed 管理层的观点——碳化硅的市场潜力巨大,但“让它起步并不容易,”他说。 建造大型材料工厂并不能解决投资者的担忧。 “看起来这项技术在生产中总是比预期更具挑战性,”他说。欧文表示,即使 Wolfspeed 考虑出售,也必须是一家“庞然大物”。“这些人的名单很短,”他说。“一切皆有可能,但我不确定在不同的领导下进展会更快。” Irwin 表示,任何想要收购 Wolfspeed 的公司都会问两个问题:我们能否做得更快以及我们能否带来新的东西?他认为这两个问题都没有简单的答案。 Wolfspeed 是在北卡罗来纳州立大学创立的,该公司的高管坚称,他们正在尝试做的事情的需求远远超过了供应。他们在财报电话会议上一直呼吁保持耐心。 首席执行官 Gregg Lowe 在 1 月份表示:“在变革性的行业转变过程中,总会有许多曲折,但我们相信,我们处于独特的地位,可以利用我们在过去几十年中积累的深厚领域专业知识,将其转化为明显的优势。” “今天,我们是世界上最大的碳化硅材料生产商。我们与全球主要功率器件生产商签订了长期供应协议。” Wolfspeed 的股价自 1 月份以来已暴跌近 50%,由于该公司未能实现财务和运营里程碑,在过去 52 周内其价值已下跌 63%,导致投资者在其增长预期未达预期之际对其战略和资本配置感到担忧。核心电动汽车终端市场已经放缓。 Jana在信中表示,尽管该公司拥有差异化的制造能力,并且作为支持能源转型的美国供应商发挥着关键作用,但每位现有股东的投资似乎都出现了亏损。 Jana 管理合伙人斯科特·奥斯特菲尔德 (Scott Ostfeld) 和公司创始人巴里·罗森斯坦 (Barry Rosenstein) 写道:“董事会为扭转股东糟糕业绩所做的努力还必须包括承诺立即对战略替代方案进行全面审查。” 信中称,投资银行高盛为该公司设定了每股 126 美元的并购目标价,较周一 Wolfspeed 目前 22.12 美元的股价溢价近 500%。 该公司还表示,Coherent公司最近将其碳化硅业务的少数股权出售给两家日本公司DENSO和三菱电机,凸显了Wolfspeed的战略价值。 Jana 呼吁采取“回归基础”战略,优先考虑执行和实现 Wolfspeed 新莫霍克谷和锡勒城工厂的关键里程碑,设定切合实际的目标并展示获得可接受的资本回报的途径。 这封信还敦促该公司重新评估未来投资的规模和时机,包括计划中的欧洲制造工厂,直到 Wolfspeed 表明其能够实现现有业务。 Jana 在 2023 年第三季度拥有 Wolfspeed 的少量股份,但在 2023 年第四季度的监管文件中并未列出该公司的股份。 Jana 拥有 23 年投资公司的记录,其中包括 Frontier Communications,该公司最近在 Jana 的压力下启动了正式的战略审查,而 Freshpet 自 Jana 开始与该公司合作以来的两年内获得了约 250% 的回报。 在此之前,Jana曾推动 Whole Foods Market 等公司进行变革,该公司于 2017 年将自己卖给了亚马逊公司。
wolfspeed
芯查查资讯 . 2024-04-23 4 23 2550
方案 | 基于ST产品的7KW车载充电机方案
4月23日,大联大控股宣布,其旗下友尚推出基于意法半导体(ST)STDES-7KWOBC开发板的7KW车载充电机方案。 图示1-大联大友尚基于ST产品的7KW车载充电机方案的展示板图 随着环保意识的日益增强和新能源汽车技术的飞速发展,电动汽车(EV)的普及率逐年攀升,已成为汽车产业发展的重要方向。其中,车载充电机(OBC)作为电动汽车充电系统的核心部件,其性能与效率直接关系到电动汽车的充电体验与使用便捷性。为简化车载充电机设计,大联大友尚基于STDES-7KWOBC开发板推出7KW车载充电机方案,可以通过家用交流电源插头或公共交流充电站为电动汽车充电。 图示2-大联大友尚基于ST产品的7KW车载充电机方案的场景应用图 该方案嵌入单相带SiC的交错图腾柱PFC和双电气隔离全桥LLC DC-DC ZVS谐振转换器,在PFC电路部分,方案采用了TN3050H-12GY-TR、STBR3012G2Y、SCTH35N65G2V-7AG和STGAP1AS器件。LLC电路部分,采用STB47N60DM6AG,STPSC20065GY-TR,A6387等元器件。在电路控制方面,PFC电路和LLC电路均采用SPC58NN84E7 MCU进行控制。STDES-7KWOBC交错图腾柱PFC的开关频率70KHz,具有电感电流平衡控制功能。而双DC-DC LLC谐振转换器在80KHz至310KHz的范围内,具有输出电流平衡控制功能,这些功能能够确保并联级的电流平衡。 此方案的电源平台是一个7KW模组,能够在输出端提供恒流(CC)或恒压(CV)。值得一提的是,铝基板上的下层绝缘金属基板(IMS)极大地提高了散热效率,支持强制空气或液体冷却方式。每个分系统模块之间的设计允许通过导线轻松实现母线连接,从而简化了设计流程。此外,方案还采用了SiC MOS/Diode,这使得系统能够实现高输出功率和更高的功率密度。 图示3-大联大友尚基于ST产品的7KW车载充电机方案的方块图 借助SiC和SJ功率MOSFET、硅和SiC二极管、栅极驱动器、SPC58NN84E7微控制器以及用于浪涌电流限制的SCR晶闸管,方案能够获得高效率和高功率密度。不仅如此,方案的每个模组都可以通过导线或汇流排实现轻松互联,这不仅可以简化连接过程,而且有助于达到更高的输出功率。 核心技术优势: 汇流排互联; 车规级MCU控制; 总峰效率大于94%; 短路、过载、过热保护; 兼容于不同类型的电池,以及不同类型的输入电源; 不同的电压和电流条件下保持稳定,以确保充电过程的正常进行。 方案规格: 前端PFC级采用2通道交错图腾柱拓扑结构,工作频率为70KHz; 数字浪涌电流控制; DC-DC级采用FB LLC谐振拓扑结构,谐振频率为140KHz; 恒流恒压模式; 基于SPC58NN84E7单片机的控制级; 12V输入电源电压与输出电压GND(高压电池)电气隔离; 汇流排互联的可能性; 功率因数校正阶段: 主要产品:TN3050H-12GY-TR SCR、STBR3012G2Y旁路二极管、SCTH35N65G2V-7AG碳化硅功率场效电晶体; 输入:85V至265V交流,45Hz至65Hz; 数字浪涌电流限制器; 最大输入电流:32A有效值; 开关频率:70KHz; 连续导通模式(CCM)下的平均电流模式控制; PID或2p2z 2x独立电流环路稳压器; PID或2p2pz稳压器; SPC58NN84E7单片机控制器。 DC-DC级: 主要产品:STB47N60DM6AG功率场效电晶体、STPSC20065GY-TR输出二极体、A6387栅极驱动器; 输出电压:250V至450V直流; 开关频率:92KHZ至250KHz,启动频率为350KHz; 两个独立的电流环路(CC); 一个电压环路加电流平衡(CV); PID调节器; SPC58NN84E7单片机控制器。 符合RoHs标准。
ST
大联大 . 2024-04-23 2 4 1436

涨价!希捷宣布对机械硬盘立即涨价,此前西部数据已连续涨价
4月23日消息,继美国存储大厂西部数据宣布对于旗下的机械硬盘(HDD)进行涨价之后,另一家机械硬盘大厂希捷科技(Seagate)近日也向客户发出涨价函,宣布将对新订单和超出先前承诺数量的需求立即进行涨价。 对于此次涨价的原因,希捷在涨价函中指出,“我们业务的几个部门的需求仍在继续恢复,我们的制造能力下降限制了我们满足所有客户需求的能力,并导致交付周期延长。此外,我们的成本继续受到全球通胀压力的影响。因此,我们将对新订单和超过先前承诺数量的需求立即实施涨价。 希捷进一步表示,“供应限制预计将持续,因此我们预计未来几个季度价格将继续上涨。” 值得注意的是,另一家机械硬盘大厂西部数据在去年12月就曾对客户发出了涨价通知函,强调未来几个季度NAND Flash产品的价格将采取周期性调涨方式,预期累计将上涨55%。同时公司HDD产品会也每周审查定价,预计2024年上半年价格会上涨。 今年4月8日,西部数据再度向供应商发布了涨价通知函,宣布将在二季度继续对NAND Flash和机械硬盘产品进行涨价。 西部数据在涨价函中表示,市场对于西部数据的NAND Flash和机械硬盘产品组合的需求高于预期,导致供应受限。此外,整个电子行业的供应链挑战正在进一步影响供应可用性。因此,将在本季度继续提高NAND Flash和机械硬盘产品的价格,一些变化将立即生效。这些更新将适用于西部数据的整个产品组合。此外,西部数据还将继续进行频繁的定价审查,并进行相应的调整。
快讯
芯查查资讯 . 2024-04-23 2 7 1781
NIV3071 eFuse 在汽车应用中的优势
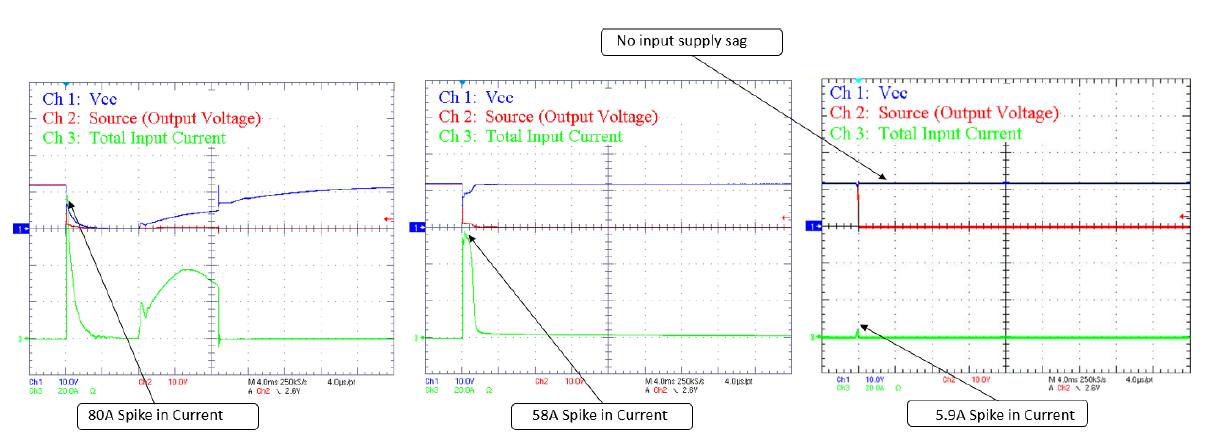
简介 汽车电气化推动了电子保险丝“eFuse”取代机械继电器和熔断器,以实现更紧凑、更高效的解决方案。NIV3071 eFuse 可保护下游电路免受过流、过温和接地短路事件的影响,并可通过开漏 FAULT 引脚提供故障指示器。该器件具有四个集成高侧通道,可以通过 EN 引脚独立控制,也可以并联在一起以用于更大的负载。该器件具有可配置的电流限制功能和导通时间,可支持多种负载。 汽车应用中的 NIV3071 在汽车应用中使用 NIV3071 有几个优势。该器件采用 6x5 mm 封装,与机械继电器和熔断器等传统解决方案相比,大大减少了所需的电路板面积。与这些传统解决方案相比,eFuse 在发生故障时无需更换,因为其保护功能将同时保护器件和负载,从而在整个车辆中实现分布式区域控制架构。该器件有两个版本:锁存型和自动重试型。如果发生故障,锁存器件将锁闭,直到通过切换 EN 引脚或功率循环发送命令为止。自动重试器件将等待 3 ms,如果进入热关断保护,则会等待足够冷却芯片的时间,然后再尝试重新导通。 与传统保险丝相比,NIV3071 的另一个优势是在发生故障时,其短路响应时间非常快,仅为 6 s。与图 1 所示的传统保险丝相比,这分别降低了峰值电流和功耗,对任何相关线束的峰值电流和额定功率都有益。此外,快速响应时间可防止输入电源电压骤降,从而保护任何安全攸关的负载以及使用同一电源的其他负载,如图 2 所示。 图 1.左侧插片式保险丝,中心 PTC,右侧 NIV3071 eFuse 图 2.同一电源上有多个 eFuse NIV3071 由四个集成通道组成,可以独立驱动,也可以并联在一起,以提供更多负载电流,如图 3 所示。输入可以由不同的电源或公共电源供电。凭借这种灵活性,NIV3071 可以通过同一器件轻松支持 48 V 和 12 V 负载。这在汽车应用中非常有利,因为通过一个器件即可保护 ECU(电子控制单元)中的 48 V 和 12 V 负载。 图 3.NIV3071 的配置 该器件应与稳压电源搭配使用。由于该器件具有 UVLO 功能且无反向电流保护,因此不建议用在需要冷启动和抛负载(负载突降)的其他汽车应用。 动态特性和注意事项 导通时序 NIV3071 具有受控导通功能,可以通过导通延迟时间 (Tdly(On)) 和导通时间 (tRAMP(On)) 进行描述,如图 4 所示: 图 4.NIV3071 的导通时序 导通延迟时间定义为 EN 引脚达到其最大值的 90% 到输出端达到标称电压的 10% 之间的时间。导通时间定义为输出端达到标称电压的 10% 至 90% 之间的时间。如果 EN 引脚上出现任何瞬时电压尖峰,或者微控制器在加电时发送正确逻辑信号略有延迟,则导通延迟时间会用作去毛刺滤波器,以确保在预期导通时间安全启动负载。 导通时间功能可以通过外部电容进行配置。要正确使用导通时间功能,必须考虑负载类型。虽然对于容性负载来说,增加导通时间有助于减少浪涌电流尖峰,但对于阻性负载,随着输出电压上升,消耗的电流将持续增加。由于该直流电流和延长的输出导通时间会导致在器件上产生电压梯度,器件将消耗大量功率,并可能在器件完全导通之前进入热关断状态以保护芯片。这取决于输入电压、输出电压导通时间、负载电流曲线和环境温度。 浪涌电流控制 NIV3071 和安森美 (onsemi) 的其他 eFuse 具有浪涌电流控制功能,可限制导通容性负载时出现的峰值电流。该功能由一个外部引脚控制,该引脚可以保持开路,或者在 dvdt 引脚和地之间使用一个较小值的陶瓷电容。通过向该引脚添加电容,可以延长输出导通时间,从而降低峰值电流,可以表示为: 以下关系式可用于控制给定 Cload 下的峰值电流: 图 5.导通时间与 dv/dt 引脚电容的关系 使用上述公式和图 5,用户可以设置导通容性负载时的最大浪涌电流。下面的图 6 和图 7 提供了一个测试用例: 图 6.浪涌电流控制测试用例 图 7.测试用例的测量结果 大容性负载和肖特基二极管 对于较大的容性负载(和低电流直流负载),可以在输出和输入之间放置一个肖特基二极管,如图 8 所示,以在器件关断时保护 eFuse 的体二极管免受过大反向电流的影响。一旦输入电压降至 UVLO 以下,器件就会关断,由于输出电容在完全放电之前维持输出电压,这会在器件上产生反向电压。与此同时,负电压对肖特基二极管进行偏置,提供了在器件周围放电的路径,如图 9 中的测量结果所示。 图 8.使用肖特基二极管防止反向电流情况 图 9.测量流经器件和外部肖特基二极管的电流 关闭感性负载 在输出端发生接地短路或过流故障事件期间,NIV3071 可快速关断以同时保护器件和下游电路。如果电源路径中存在很大的电感(例如电缆),则快速关断将导致电压尖峰超过器件的额定电压。为了缓解这些电压尖峰,可以使用多种选项。可以在输入和接地端之间放置一个 TVS 二极管,而肖特基二极管可以作为续流二极管与负载并联放置。此外,RC 缓冲电路可与负载并联使用。如果具体应用中的预期电感超过 5 uH,则强烈建议使用外部肖特基二极管或缓冲器。 总结 随着汽车市场的电气化趋势不断升级,且 48 V 系统越来越普及,NIV3071 在汽车应用中具有诸多优势。
安森美
安森美 . 2024-04-23 1 1111
苹果公布2023财年供应链名单,中国大陆公司新增8家剔除4家
4 月 23日消息,苹果公司在其官网公布了 2023 财年供应链名单,该名单中的公司包含了苹果在 2023 财年全球产品材料、制造和组装方面的 98% 直接支出。 在这份名单中,新增 8 家中国大陆企业,同时剔除了 4 家中国大陆企业。 新增的 8 家中国大陆企业包括: 宝钛股份(Baoji Titanium Industry Co., Ltd.) 酒泉钢铁(Jiuquan Iron & Steel (Group) Co., Ltd.) 中石伟业科技(Jones Tech PLC) 凯成科技(Paishing Technology Company) 三安光电(San'an Optoelectronics Co., Ltd.) 博硕科技(Shenzhen BSC technology Co., Ltd.) 东尼电子(Zhejiang Tony Electronic Co., Ltd.) 正和集团(Zhenghe Group) 剔除的 4 家中国大陆企业为: 江苏精研科技(Jiangsu Gian Technology Company Limited) 美盈森集团(MYS Group Company Limited) 深圳市得润电子(Shenzhen Deren Electronic Company Limited) 盈利时(Winox Holdings Limited) 中国台湾方面,南电暌违多年重返供应链名单,金箭印刷集团(Golden Arrow Printing Company Limited)新进名单,而去年首度入列的联咏仅待一年后就遭剔除,其余如南亚科、嘉泽、钛鼎科技也都遭剔除。 此外,印度塔塔集团旗下的塔塔电子因收购纬创印度厂,今年也首度入列苹果供应链名单中,成为全球供应链重塑的一大象征。 苹果计划在 2030 年达成苹果所有产品的碳中和。在原材料、生产和运输这三个方面,苹果正推进上百项减碳相关的项目。绝大部分苹果供应链企业已承诺到 2030 年为所有与苹果相关的生产实现碳中和,苹果在这份名单里进行了特别标注。 仅有四家企业没有承诺实现碳中和,分别是: 英特尔(Intel Corporation) 高通(Qualcomm Incorporated) 微芯(MicroChip Technology Incorporated) 新思科技(Synaptics Incorporated)
快讯
芯查查资讯 . 2024-04-23 1 9 1421
目之所及,科技所至:新2系示波器限量追光版重磅来袭
我们一直在创新前行 2系列示波器自面市以来,凭借卓越的技术性能和人性化设计赢得了业界的广泛赞誉。它不仅拥有高达500MHz的带宽和2.5GS/s的超高采样率,还提供了10Mpts超长记录长度,让每一次测量都精准无误。 创新不止步,美学同行 透明版的新2系列示波器将科技美学和实用功能完美结合,透明外壳让每一个电路和组件的运作都一目了然,提供了前所未有的交互体验,是每位工程师和科技爱好者的理想选择。 抢先体验,独家限量 5月8日,限量发售。 准备好抢先体验未来的测量技术了吗? // 立即扫码限时秒杀 限量宠粉价:¥????9
示波器
泰克科技 . 2024-04-23 1 1 870

智能割草机采用单轴陀螺仪XV7011BB,有效解决运行偏航、信号丢失问题
智能割草机作为现代家庭和商业草坪维护保养的重要工具,其精确的定位和导航系统对于提高机器工作效率和确保安全运行至关重要。在智能割草机的发展历程中,定位和导航技术一直是关键的创新点。 传统的基于RTK(实时动态差分定位技术)技术的割草机虽然在开阔地带表现出色,但在家庭花园等封闭或半封闭空间中,其性能受限于GPS信号的遮挡和干扰,导致定位不准确引起位置漂移,甚至频繁丢失信号。此外,RTK系统一般由基准站、数据链、流动站三部分组成,系统复杂、成本高昂、维护及校准数据门槛高等原因也限制了RTK系统智能割草机的普及。 针对这些挑战,EPSON单轴陀螺仪XV7011BB可为智能割草机的导航系统提供新的解决方案。该产品支持SPI / I2C 输出接口,16/24bit角速度输出;工作温度范围 -20 °C to +80 °C(选项:-40 °C to +85 °C),具有非常出色的零偏稳定性,内置温度传感器及可选择的数字滤波器,进一步确保信号的稳定输出;工作电压范围在2.7~3.6V之间,提供SPI / I2C输出接口,封装尺寸仅为5mm*3.2mm*1.3mm,方便控制系统集成。 详细规格参数见下图: 核心应用优势 ±100°/s的测量范围,满足精准的运行路径 相比于传统的RTK系统,XV7011BB单轴陀螺仪在封闭或半封闭空间中表现出更高的稳定性和准确性。其±100°/s的测量范围能够满足割草机在正常工作条件下可能遇到的各种角速度变化,而在16位分辨率下,能够检测到最小为0.00305°/s的角速度变化,在24位分辨率下更是降低至0.0000119°/s,保证了极高的测量精度。这意味着即使在树木繁茂或墙壁环绕的环境中,XV7011BB也能提供稳定的角速度数据,确保割草机的导航系统持续工作。 此外,在割草机应用中通过对角速度数据的实时分析,控制系统可以计算出机器的实际姿态和运动趋势。这包括检测旋转、侧倾、转弯或其他非直线运动。再结合其他传感器(如超声波、红外或摄像头)的数据,割草机的控制系统可以精确地调整方向和速度,以避免碰撞并继续沿着预定的路径割草,同时也为避障系统提供了必要的数据支持。 休眠电流低至3μA,助力设备长久续航 相对于RTK系统需要持续接收和处理复杂的GPS信号通常具有较高的功耗(工作态电流消耗在几百毫安左右),单轴陀螺仪XV7011BB的低功耗特性对于电池供电的割草机来说是一个显著优势。XV7011BB芯片由于不依赖外部信号,在非通信状态下典型电流消耗为0.9mA,待机电流仅为160μA,休眠电流更是低至3μA。在功耗和电流消耗方面,XV7011BB单轴陀螺仪明显优于RTK系统定位模块。这有助于延长割草机的工作时间,减少充电频率,提高用户的便利性。 0.003(°/s)/√Hz at 10Hz低噪声特性,减少运行误判 低噪声特性是陀螺仪性能的一个重要指标,噪声会导致陀螺仪输出的信号与实际角速度之间的误差,从而降低测量的精度。 对于消费级和工业级MEMS陀螺仪,噪声水平通常在以下范围内: 消费级陀螺仪:噪声水平可能在0.01(°/s)/√Hz到0.1(°/s)/√Hz之间,这些陀螺仪通常用于游戏控制器、智能手机和其他低成本应用。 工业级陀螺仪:噪声水平可能在0.01(°/s)/√Hz以下,这些陀螺仪适用于需要更高精度的工业和应用。 高精度陀螺仪:对于高精度应用,如惯性导航系统,噪声水平可能更低,甚至可以达到0.001(°/s)/√Hz或更低。 XV7011BB单轴陀螺仪的噪声参数为0.003(°/s)/√Hz at 10Hz,这个值在工业级和高精度应用中是比较低的。意味着XV7011BB单轴陀螺仪在这个频率下输出的角速度信号变化在0.003°/s的范围内,确保了陀螺仪输出的信号更加接近实际的角速度变化,可减少了因噪声引起的误判,提高了避障系统的准确性。 综上所述,EPSON单轴陀螺仪XV7011BB为智能割草机的导航系统带来了全新的改进,它不仅提高了割草机在复杂环境中的导航稳定性和精确性,还降低了系统的整体成本。随着智能割草机技术的不断进步,XV7011BB陀螺仪的应用可为用户带来更加智能、高效、经济的割草体验。
爱普生电子元器件官方 . 2024-04-22 570

惯性测量单元M-G370系列有高稳定性、高精度和小尺寸封装,广泛用于工业领域
爱普生现已推出型号为M-G370系列的高稳定性、高精度及极小尺寸封装的惯性测量单元(IMU),可广泛应用于工业系统的各个领域。 为了节省PCB的面积和产品空间,M-G370系列惯性测量单元设计精巧,且具有6个自由度:三轴角速率和三轴线性加速度,系统采用高精度补偿技术,提高了产品的稳定性和高精度测量能力。IMU内置存储单元用于保存各校准标定参数,这些参数在上电后可以自动提取应用到实际的测量中。 M-G370系列支持通用的SPI或者UART通讯,这些数字化的通讯便于系统设计,降低了工程师的应用门槛,易于上手、调试和应用。 产品基本特性参数 惯性测量单元M-G370系列采用单电源3.3V供电,工作电流的典型值为16mA, 可以在-40~85℃的温度范围内进行校准和持续工作,数据分辨率高达32位,数据输出可达2K Sps,支持外部触发输入和外部计数复位输入,6个自由度中三陀螺仪为±450 °/s,三加速度为±10 G,初始基准偏差360°/ h (1σ) / 2mG (1σ)。更多参数详见产品手册。 M-G370系列的功能框图及引脚示意如下图所示: 图一:功能框图 惯性测量单元与MCU的应用连接: 从如下图所示,通过UART接口或者SPI接口的简单连接,即可实现控制系统与惯性测量单元的数据通讯,实现系统配置、参数标定和检测结果的获取。图中的DRDY引脚为状态输出,可与单片机的中断输入连接,在IMU完成一轮数据检测时,可通过该引脚主动通知MCU检测完成,向MCU发送检测数据触发中断,避免了MCU的主动查询,节省了MCU的机器周期。 图二:应用连接框图 几点应用注意事项: 1. 通讯接口:可以采用SPI通讯或者UART通讯,但不要同时连接两种通讯,否则可能会导致工作异常。 2. 空引脚处理:对于那些在设计中没有用到的引脚,需要通过上拉电阻连接到VCC,不要直接悬空。 3. 复位引脚:如果设计中不需要对芯片做复位处理,该引脚也需要连接到VCC电源端。 4. 输入引脚:该器件中的所有输入引脚,IMU内部均有弱上拉电阻。 5. ESD保护:在存储及碰触该IMU时,注意做好ESD保护,ESD可能会使该器件性能衰减,部分异常甚至彻底损坏。 M-G370系列采用迷你设计,20针可插拔式接口,方便根据系统实际需求安装应用,如下图所示,该IMU的长*宽*高为24*24*10mm,重量仅为10克, 图三:外形尺寸及标示 基于以上优异的性能参数,惯性测量单元(IMU)M-G370系列可应用于诸如摄像头云台、导航、振动控制及稳定系统、定向跟踪系统等领域。爱普生惯性测量单元(IMU)有一系列的产品供选型应用,在实际应用中,如果你的产品设计需要更多的参数或精度要求,请与世强FAE联系取得相应的技术支持,相信该IMU系列产品中总有一款可以满足您的期待和产品设计。 更多资讯请关注公众号
爱普生电子元器件官方 . 2024-04-22 745

高精度三轴加速度计M-A352AD10实现更快更准的地震监测,可实现DC~460Hz的全频段监测
全球每年因地震而造成的经济损失高达358亿美元,并且有上升的趋势。面对如此天灾,我们可以利用现代化的技术和地震监测设备在地震活跃地区进行实时的动态监测,尽可能地提前发现即将到来的地震而发出避险警告,或者当地震发生后速度定位到震中位置尽早开展搜救。 图源数据 中国地震台网 地震监测设备如何快速监测到地震波的发生?如何快速地将地震信号传输到系统或设备上,让人快速做出相应对策?如何在恶劣的环境下,仍能保持稳定可靠的监测?其核心之一就是采用了传感器技术和相关设备,我们可以在地震易发生区域或重点观察的区域大规模部署小型传感器,结合物联网数字化技术集成到地震监测系统中,即可做到无需人工维护,长期连续地对相关区域进行监测。但在实际应用中,还是会存在不少问题。如:单体设备测量频率不够宽需要多种设备配合才能涵盖所需测量的所有频率范围、监测精度不足、无法很好地适应严苛的户外环境等。 为了解决这些问题,EPSON针对地震监测行业不断优化升级的高精度三轴加速度计M-A352AD10可以发挥较好的作用,该产品在日本气象厅认证的烈度计中已得到成功应用。下面让我们一起来看看EPSON最新的高精度三轴加速度计M-A352AD10如何对地震进行有效监测。 上图信息来源于日本EPSON官网 DC到460Hz超宽频率范围,准确监测所有震动 因为不同介质的影响,地震波会存在不同的频率,其分布范围从DC到400Hz均有存在。这就意味着要全面地监测,就必须要覆盖全频段。当然,通过多个监测单元,对不同频段进行独立监测的方式是可行的。但是,很多时候受限于部署环境,无法同时部署多个监测单元,这就会导致用户需要选择测量频率段,无法全面地监测所有震动情况。因此,如何通过单个传感器实现全频段地震监测,是一个需要解决的难题。 高精度三轴加速度计M-A352AD10利用数字传感器技术,通过内置可编程数字滤波器,可以精确地过滤出所需频率段的信号,从而不再需要多个不同频率段的监测单元,即可以实现从DC~460Hz的全频段监测,真的做到依靠单个传感器在任何环境条件下均可部署和全面监测,从而解决用户需要选择频率段的困扰。 与此同时,高精度三轴加速度计M-A352AD10宽达±15g的输出量程,即使是面对10级地震烈度的峰值加速度(约1g)也可以随时输出。而其抗干扰性能也令人印象深刻,低至0.2µG/√Hz的平均噪声密度性能,如按照6Hz频率点算,仅为不到1µG的噪声值,对测量结果影响几乎可以忽略不计,极大地提高测量精度,从而更全面地保障对所有震动的准确监测。 1000G的抗冲击能力,保持长期稳定运行 由于地震监测需要连续长期的测量,因此高可靠是其重要的考量因素之一。但因为现有的传统监测单元包含了很多机械结构部分,一旦设备处于震中受到直接冲击,很多时候都会被损坏。不仅带来了经济损失,而且也无法为后续余震和快速震源定位提供支持。 EPSON采用QMEMS技术设计,使得高精度三轴加速度计M-A352AD10内部设计极其紧密,无易损机械单元,让其拥有高达1000G的抗冲击能力,对比上一代产品的300G,参数有了大幅度的提升。即使面对速度高达7千米/秒的纵波直击时产生的瞬时700多G的加速度力也不会损坏,可以较好地应对长期户外部署监测的可靠性难题。 小尺寸轻量化,快速集成到系统中 以往的地震监测手段,大多依靠机械感知震动然后转化为电信号的方式来监测,而且对于不同方向上的感知还需要分别用不同的单元进行测量,这就使得监测设备整体非常大和臃肿,在实际部署中往往有很多限制,同时运维费用也很高。 基于这个问题,高精度三轴加速度计M-A352AD10有自己的解决思路。其利用半导体传感器技术,将原本复杂精细且不好维护的监测结构,转变为稳定高效的数字传感单元,可以实现在单个传感单元上同时对XYZ三轴的同步监测。M-A352AD10的整体尺寸为48x24x16mm大小,长宽尺寸还没有一张信用卡大,而且重量仅为25g。相较于以往的传统监测单元动辄数倍的体积和重量有了质的飞跃,真正做到了极致的轻量化,为产品集成更多功能提供了可能性,使得地震监测产品可以进一步优化产品结构。 更多资讯请关注爱普生公众号
爱普生电子元器件官方 . 2024-04-22 65

从芯来到“香山”,芯华章助力国产RISC-V生态做了哪些事?
4月18日,芯华章联合芯测、赛昉科技等7家公司举办联合技术论坛,吸引了来自阿里巴巴达摩院、新华三、寒武纪、芯来科技、华大半导体、蓝芯算力的几十位验证工程师参与。 在现场,我们的分享从 RISC-V架构的特点讲起,再到由此带来的验证挑战,以及针对这些挑战,芯华章验证工具做了哪些不一样的技术设计,获得了客户什么样的部署效果。 RISC-V生态:大家好才是真的好 2018年,ARM以“设计系统芯片之前需要考虑的五件事”为主题,从成本、生态系统、碎片化风险、安全性和设计保证方面指出RISC-V还有很多不足。 但6年过去,生态系统不断完善的RISC-V,因其开源、简洁、灵活等特性,采用率也正在快速增长,特别是在物联网、边缘计算和汽车电子等新兴领域。市场研究机构Semico Research预测,到2025年,RISC-V处理器核心将接近800亿个,成为X86、ARM之外的第三大架构生态。 作为一种新兴指令集,RISC-V的验证工作就尤为重要,因为比起成熟的架构,RISC-V充满了更多的开放性和不确定性。只有借助更充分、更完备的验证,才能保障基于RISC-V架构相关产品的稳定性,从而助力其获得大规模的商业部署。 特别是考虑到从架构到IP再到系统级应用,RISC-V都有自己区别于传统架构的独特挑战。我们认为其中有五个方面的内容比较典型,也是本次现场分享的重点: ◉ RISC-V 高性能处理器(CPU、GPU、AI等)的架构方案少、成熟度低,处理器设计团队需要在RISC-V芯片的应用场景上进行架构验证 ◉ CPU定制程度更高,实现碎片化,需要更强更完备的验证,比如既需要单指令运行合规性验证;又需要完备的多指令运行验证:发现Data forwarding、Dead Lock等深层次的逻辑实现错误;浮点单元、AI加速单元等用户实现模块的精度高,验证难度大 ◉ 从IP到SoC的实现过程需要大量的仿真和调试,高性能物理验证平台和高可调试的硬件仿真平台资源都不够用;PCIE/DDR/HBM等高性能外设需要系统级仿真验证方案 ◉ 更多软件生态需要移植到RISC-V处理器,但由此带来的bug是软件问题还是硬件问题?定位和调试困难,需要更强大的软件代码-硬件电路联合调试手段 ◉ 芯片的后端实现过程中,需要高效验证每个步骤变换的等价性 100亿颗RISC-V处理器一半来自中企 在验证领域,“初生牛犊”的芯华章,和“年轻的”RISC-V其实容易碰撞出更多火花。因为我们可以不受以前的技术包袱拖累,从底层架构创新做起,快速适应新的指令集扩展,同时提供灵活的脚本接口,允许工程师自定义验证环境,以适应不断变化的RISC-V生态系统。 在和国内领先的RISC-V处理器IP供应商芯来科技合作中,芯华章GalaxPSS智能验证工具,在多核CPU研发项目的cache一致性验证中就获得了客户的实名点赞。 其中一个关键,是芯华章基于自主研发,已经打造了成熟的多核一致性模型。 借助这一模型,GalaxPSS可以方便地生成大量针对Cache Coherency的C testcase。C case中,我们也进行了expected result的计算,可以将读出的数据与Expected data进行比对,并将比对结果打印成log,方便客户高效完成后续调试。 此外,GalaxSim通过对SystemVerilog和UVM标准的支持,能够为RISC-V CPU的研发提供仿真支持,同时其独有的Turbo模式更能成倍加速多核RV处理器的仿真验证效率。 目前,GalaxSim在多个客户测试用例上已经取得了2-3倍的仿真性能提升,大幅降低了仿真回归测试的时间,提升验证效率。 另一个不得不提的是“香山”项目。“香山”RISC-V,作为一个由中国科学院计算技术研究所孕育出的开源RISC-V处理器项目,在很多方面都极其有代表性。 比如高速子卡接口验证,以及通过高速PCIe接口将设计连接至真实的主机实现混合仿真,从而实现更好的软硬件协同验证等等。在这些方面,芯华章HuaPro P2E都发挥了很关键的作用。 因为不同于传统的原型验证或硬件仿真,HuaPro P2E基于统一的软件平台和统一硬件平台,实现了有效的创新双模工作形式: ◉ 硬件仿真模式下支持高达7千多个全信号互连,全信号不限深度的调试,以及各种虚拟验证方案 ◉ 在原型验证模式下,通过一键式原型验证流程可以大大缩短验证时间,在超大规模SOC设计可以实现高达10M的仿真速率,以满足软件开发调试需求,同时还有丰富的接口解决方案 不仅仅是这些,芯华章Fusion Debug还针对RISC-V处理器提供定制调试服务,包括: ◉ 为客户的RISC-V core定制Fusion Debug CPU core模型 ◉ 为客户的多核RISC-V CPU定制多核CPU模型 ◉ 为客户的软件调试工具定制“硬件仿真-软件运行联合调试方案“,支持硬件电路和C代码的联合调试 同时,在芯片后端实现过程中,芯华章的GalaxEC也能够高效地验证每个步骤变换的等价性,确保设计在整个实现过程中的一致性和正确性。 一枝独放不是春,百花齐放春满园。根据RISC-V基金会的数据,截至2022年底,全球RISC-V处理器的出货量已达到100亿颗,其中近一半来自中国。 随着RISC-V技术的不断成熟和应用领域的扩大,芯华章将继续推动EDA工具的发展,助力RISC-V产业迈向新的高度。
芯华章科技
芯华章科技 . 2024-04-22 1011
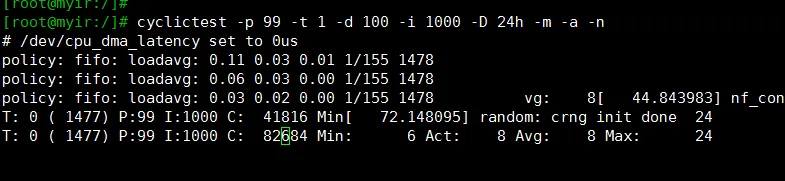
干货 | 米尔Remi Pi 实时系统与EtherCAT移植
Remi Pi采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31 GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600 / DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、SD卡、MIPI-CSI等外设接口,在工业、医疗、电力等行业都得到广泛的应用。 在开发阶段,建议配合核心板配套的评估套件 MYD-YG2L23-8E1D-120-C-REMI来加速开发。评估套件的详细信息请访问:https://www.myir.cn/shows/23/14.html 实时内核设计 实时补丁我们选择RT-Preempt来实现 2.1. 移植补丁 RT补丁可以从RT官网下载5.10.83对应的补丁 https://cdn.kernel.org/pub/linux/kernel/projects/rt/5.10/older/ 把补丁放到自己的工作目录下,然后解压,如图2-1: hjx@myir-server:~/renesas/04_Sources$ tar -xvf patches-5.10.83-rt58.tar.gz 图2-1. 内核源码 进入到内核源码打补丁,如图2-2: hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ for p in `ls -1 ../patches/*.patch`; do patch -p1 < $p; done 图2-2. 打实时补丁 编译内核源码 hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ /opt/remi-sdk/environment-setup-aarch64-poky-linux hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ make ARCH=arm64 mys_g2lx_defconfig hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ make ARCH=arm64 Image dtbs -j16 更新编译得到的Image即可 2.2. 其他影响性能的配置 禁用CPU Freq自动调频,并设置主频为最高频率: cd /sys/devices/system/cpu/cpufreq/policy0 echo userspace > scaling_governor cat scaling_max_freq > scaling_setspeed (如不禁用cpufreq调频功能,系统会因动态调频产生极大的偶然延迟) 实时性测试 空载测试 cyclictest -p 99 -t 1 -d 100 -i 1000 -D 24h -m -a -n 图3-1.空载测试 CPU&内存满载 cyclictest -p 99 -t 1 -d 100 -i 1000 -D 24h -m -a -n 增加压力 stress-ng --cpu 4 --cpu-method all --io 4 --vm 50 -d 5 --fork 4 --timeout 36000s 图3-2.满载测试 数据对比: 板卡 MYD-YG2LX-REMI 测试时间 120min 指令 cyclictest &stress-ng 空载 平均 8us 最大 24us 满载 平均 13us 最大 136us 表3-1.数据信息 EtherCAT IGH移植 4.1. 下载EtherCAT IGH源码 到官网下载1.5版本的EtherCAT源码,如图4-1: https://gitlab.com/etherlab.org/ethercat/-/tree/stable-1.5?ref_type=heads 图4-1. 下载源码 解压EtherCAT源码 hjx@myir-server:~/renesas/04_Sources$ tar -xvf ethercat-stable-1.5.tar.bz2 hjx@myir-server:~/renesas/04_Sources$ cd ethercat-stable-1.5 加载sdk环境变量 hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ source /opt/remi-sdk/environment-setup-aarch64-poky-linux 4.2. 编译EtherCAT源码 生成configure文件 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ./bootstrap + touch ChangeLog + mkdir -p m4 + autoreconf -i libtoolize: putting auxiliary files in AC_CONFIG_AUX_DIR, 'autoconf'. libtoolize: copying file 'autoconf/ltmain.sh' libtoolize: putting macros in AC_CONFIG_MACRO_DIRS, 'm4'. libtoolize: copying file 'm4/libtool.m4' libtoolize: copying file 'm4/ltoptions.m4' libtoolize: copying file 'm4/ltsugar.m4' libtoolize: copying file 'm4/ltversion.m4' libtoolize: copying file 'm4/lt~obsolete.m4' configure.ac:56: installing 'autoconf/ar-lib' configure.ac:55: installing 'autoconf/compile' configure.ac:58: installing 'autoconf/config.guess' configure.ac:58: installing 'autoconf/config.sub' configure.ac:42: installing 'autoconf/install-sh' configure.ac:42: installing 'autoconf/missing' examples/dc_user/Makefile.am: installing 'autoconf/depcomp' configure设置 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ mkdir output hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ./configure --prefix=/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output --with-linux-dir=/home/hjx/renesas/04_Sources/myir-renesas-linux --enable-8139too=no --enable-generic=yes --host=aarch64-poky-linux (--prefix=/home/hjx/renesas/04_Sources/output 指定输出目录、--with-linux-dir=/home/hjx/renesas/04_Sources/myir-renesas-linux指定内核源码目录) configure: loading site script /opt/remi-sdk/site-config-aarch64-poky-linux checking for a BSD-compatible install... /usr/bin/install -c checking whether build environment is sane... yes checking for aarch64-poky-linux-strip... aarch64-poky-linux-strip checking for a thread-safe mkdir -p... /bin/mkdir -p checking for gawk... gawk checking whether make sets $(MAKE)... yes checking whether make supports nested variables... yes checking whether make supports nested variables... (cached) yes checking for a sed that does not truncate output... (cached) sed checking for aarch64-poky-linux-pkg-config... no checking for pkg-config... /opt/remi-sdk/sysroots/x86_64-pokysdk-linux/usr/bin/pkg-config checking pkg-config is at least version 0.9.0... yes checking whether make supports the include directive... yes (GNU style) .......... ............... config.status: creating examples/xenomai/Makefile config.status: creating examples/xenomai_posix/Makefile config.status: creating include/Makefile config.status: creating lib/Makefile config.status: creating lib/libethercat.pc config.status: creating master/Kbuild config.status: creating master/Makefile config.status: creating script/Makefile config.status: creating script/init.d/Makefile config.status: creating script/init.d/ethercat config.status: creating script/sysconfig/Makefile config.status: creating tool/Makefile config.status: creating tty/Kbuild config.status: creating tty/Makefile config.status: creating config.h config.status: executing depfiles commands config.status: executing libtool commands 编译源码 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make make all-recursive make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' Making all in include make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Nothing to be done for 'all'. make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' Making all in script make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script' Making all in init.d make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Nothing to be done for 'all'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' Making all in sysconfig make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/sysconfig' make[3]: Nothing to be done for 'all'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/sysconfig' ...... ...... make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/user' make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[3]: Nothing to be done for 'all-am'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' 编译modules hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make modules make[1]: Entering directory '/home/hjx/renesas/04_Sources/myir-renesas-linux' CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/mini/mini.o LD [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/mini/ec_mini.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/cdev.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/coe_emerg_ring.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/datagram.o ........... ............ make[1]: Leaving directory '/home/hjx/renesas/04_Sources/myir-renesas-linux' 编译通过会对应生成ethercat-stable-1.5/devices/ec_generic.ko和ethercat-stable-1.5/master/ec_master.ko 4.3. 安装EtherCAT 安装成功后前面指定/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output目录下有编译生成的各种用户空间的文件。 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make install Making install in include make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Nothing to be done for 'install-exec-am'. /bin/mkdir -p '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output/include' /usr/bin/install -c -m 644 ecrt.h ectty.h '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output/include' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' Making install in script make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script' Making install in init.d make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Nothing to be done for 'install-exec-am'. ........... .......... make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Nothing to be done for 'install-exec-am'. make[2]: Nothing to be done for 'install-data-am'. make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' 4.4. 将EtharCAT相关文件打包 在/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output目录下创建modules文件夹,并复制ec_generic.ko和ec_master.ko到modules下 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ mkdir -p output/modules hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ cp devices/ec_generic.ko output/modules/ hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ cp master/ec_master.ko output/modules/ hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ls output bin etc include lib modules sbin share 压缩output输出文件 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ tar -jcvf output.tar.bz2 output/ output/ output/etc/ output/etc/ethercat.conf output/etc/init.d/ output/etc/init.d/ethercat output/etc/sysconfig/ output/etc/sysconfig/ethercat output/sbin/ output/sbin/ethercatctl output/include/ output/include/ectty.h output/include/ecrt.h output/modules/ output/modules/ec_master.ko output/modules/ec_generic.ko output/share/ output/share/bash-completion/ output/share/bash-completion/completions/ output/share/bash-completion/completions/ethercat output/bin/ output/bin/ethercat output/lib/ output/lib/libethercat.so output/lib/pkgconfig/ output/lib/pkgconfig/libethercat.pc output/lib/libethercat.so.1.2.0 output/lib/cmake/ output/lib/cmake/ethercat/ output/lib/cmake/ethercat/ethercat-config.cmake output/lib/libethercat.a output/lib/libethercat.la output/lib/libethercat.so.1 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ls output.tar.bz2 output.tar.bz2 至此IGH交叉编译完成,下面是在对应arm目标板上的操作。 4.5. 移植EtherCAT相关库到开发板 将上面制作好的output.tar.bz2传到开发板上,然后解压出来。 root@myir-remi-1g:~# tar -xvf output.tar.bz2 output/ output/etc/ output/etc/ethercat.conf output/etc/init.d/ output/etc/init.d/ethercat output/etc/sysconfig/ output/etc/sysconfig/ethercat output/sbin/ output/sbin/ethercatctl output/include/ output/include/ectty.h output/include/ecrt.h output/modules/ output/modules/ec_master.ko output/modules/ec_generic.ko output/share/ output/share/bash-completion/ output/share/bash-completion/completions/ output/share/bash-completion/completions/ethercat output/bin/ output/bin/ethercat output/lib/ output/lib/libethercat.so output/lib/pkgconfig/ output/lib/pkgconfig/libethercat.pc output/lib/libethercat.so.1.2.0 output/lib/cmake/ output/lib/cmake/ethercat/ output/lib/cmake/ethercat/ethercat-config.cmake output/lib/libethercat.a output/lib/libethercat.la output/lib/libethercat.so.1 将output目录下各文件目录的内容复制到板子根文件系统根目录下相应目录下,例如:cp bin/ethercat /bin/(include目录不用复制) root@myir-remi-1g:~/output# ls bin etc include lib modules sbin share root@myir-remi-1g:~/output# cp bin/ethercat /bin/ root@myir-remi-1g:~/output# cp etc/ethercat.conf /etc/ root@myir-remi-1g:~/output# cp etc/init.d/* /etc/init.d root@myir-remi-1g:~/output# cp -r etc/sysconfig/ /etc/ root@myir-remi-1g:~/output# cp lib/libethercat.* /lib64/ root@myir-remi-1g:~/output# cp -r lib/pkgconfig /lib64/ root@myir-remi-1g:~/output# cp modules/ec_master.ko /lib/modules/5.10.83-cip1-yocto-standard/ root@myir-remi-1g:~/output# cp sbin/ethercatctl /sbin/ 4.6. 启动EtherCAT 4.6.1. 配置主站的MAC地址 root@myir-remi-1g:~# depmod root@myir-remi-1g:~# modprobe ec_master main_devices=1E:ED:19:27:1A:B3 4.6.2. 启动EtherCAT root@myir-remi-1g:~# /etc/init.d/ethercat start Starting EtherCAT master 1.5.2 done 至此所有步骤完成。 米尔瑞米派 Remi Pi 瑞萨第一款MPU生态板卡,兼容树莓派扩展模块 采用瑞萨RZ/G2L工业级处理器,便于企业客户产品开发; Remi Pi兼容树莓派所有配件,方便产品原型搭建和创新应用; 更多的工业接口,兼顾开发、学习和实际应用; 软件系统丰富,支持Debian/Ubuntu/Linux等。 如需了解板卡,您可以通过访问以下米尔电子官网链接: https://www.myir.cn/shows/23/14.html 更多关于Remi Pi技术问题讨论请登录米尔官方论坛: https://bbs.myir-tech.com/forum-66-1.html 购买链接: https://detail.tmall.com/item.htm?id=763219500729&skuId=5425000934998
米尔
米尔 . 2024-04-22 3 916

欧洲航天局利用MVG设备大幅增强新型Hertz 2.0测试设施灵活性
天线测量解决方案领导者Microwave Vision Group(MVG)近日宣布与欧洲航天局 (ESA) 签订两份合同,位于荷兰的欧洲航天研究和技术中心 (European Space Research and Technology Centre, ESTEC)将通过MVG天线测量技术为其新型改进射频测试设施Hertz 2.0提供补充。 Hertz 2.0将受益于大型多轴定位器,使中型和重型被测设备 (DUT) 能够在任何角度方向上进行高精度测试。MVG 与 DUT 定位器一起为紧缩场(CATR)馈源提供定位系统。 为了进一步提高 HERTZ 2.0 的测试能力,该机构还指定 MVG设计和制造大型平面近场 (PNF) 扫描仪,并提出了具有挑战性的要求——在不使用时将其隐藏在紧凑型范围系统后面。 HERTZ 2.0设施的尺寸将明显大于 HERTZ 1.0 ——长32m x 宽25m x 高18m,并将确保高精度的端到端天线和卫星测试频率范围很广——从 1 GHz 到几百 GHz。当代卫星中电子设备和天线系统的集成特性激发了这种扩展。 HERTZ 2.0 将容纳一个紧凑的远场测试范围以及一个平面近场扫描仪;二合一测试室可容纳目前正在开发的最大卫星及其复杂的射频有效载荷和通信系统的测试。 暗室中的另一个二合一选项与DUT定位系统有关。该安装将允许切换两个先进的 MVG 定位子系统:一个带有翻转升降 (AZ/EL) 定位器的重型塔,负载能力高达6000公斤,将允许测试完整的卫星有效载荷和非常重的天线;一个更适合轻型DUT定位要求的中型系统,将由塔式和辊式定位器组成。 新型馈源定位器除了能够将馈源喇叭精确定位在双反射镜紧凑型范围系统的焦点之外,还具有在焦平面中扫描馈源并在静区(QZ)中将平面波传播方向移动几度的能力。 平面近场扫描仪对于精确表征至关重要的高性能高频天线特别有用。在这种情况下,为了验证太空中的全部功能,卫星有效载荷和天线系统将在专用吸波测试暗室的受控环境中进行测试。使用近场平面扫描仪的测试配置还将避免大型DUT的移动,从而优化测量效率和精度。 借助MVG 提供的解决方案,可以根据DUT的机械特性调整定位器,并在紧缩场(CATR)和平面近场(PNF)之间选择最合适的天线测量技术,从而针对特定测量活动重新配置测试设施。该测试设施还将配备 MVG 最先进的WaveStudio天线测量软件,该软件将允许数据采集、可视化和后处理,从而进一步提高测试效率。 MVG 提供的最先进的定位器和平面近场(PNF)扫描仪将在增强 欧洲航天研究和技术中心设施的测试能力方面发挥重要作用。 Hertz 2.0 注定要在电磁测试和测量方面实现无与伦比的准确性和效率,并推动欧洲卫星开发和空间应用的创新和进步。
MVG
MVG . 2024-04-22 741

动中通天线选用M-G370PDG惯性测量单元,可实时监测天线的姿态和位置变化
动中通天线系统通常包括天线、卫星信号跟踪器、调制解调器、电源管理单元和用户终端设备等部分。其中,天线是系统的关键部件,负责接收和发送卫星信号。随着移动载体的运动,天线需要实时调整方向,以保持与卫星的稳定连接。卫星信号跟踪器负责监测卫星信号的变化,并根据载体的动态调整天线指向,确保信号传输的连续性和稳定性。 动中通天线在家庭和商业领域中得到了广泛的应用,但在实际应用过程中,天线系统面临诸多挑战,如载体移动过程中容易受到震动和颠簸的影响,导致信号传输不稳定,甚至出现信号中断的情况。此外,天线的指向精度也会受到载体移动速度和路径的影响,需要人工频繁调整天线指向以保持信号的稳定。 为了解决动中通天线在移动过程中的稳定性问题,就需要一种能够实时监测天线姿态和位置变化的传感器。同时,由于天线系统的复杂性,还需要考虑传感器与天线系统的集成难度和成本。 产品参数列表 针对动中通天线的上述应用难题,EPSON推出的M-G370PDG惯性测量单元(IMU)可以较好地解决,且能给客户带来更加高效可靠的解决方案。M-G370PDG 惯性测量单元采用高精度的三轴加速度计和陀螺仪,能够实时监测天线的姿态和位置变化,并通过内置的处理器计算出天线的姿态和位置信息。优势在于其具有的高精度和稳定性,能够满足动中通天线对姿态和位置监测的严格要求。此外,M-G370PDG 惯性测量单元的体积小巧,便于集成到天线系统中,并且具有较低的功耗,可以长时间稳定工作。 具体应用优势如下: 高精度与稳定性,减少人工操作 M-G370PDG惯性测量单元采用高精度的三轴加速度计和陀螺仪,能够实时监测天线的姿态和位置变化,并根据需要调整天线指向,以保持信号的稳定。例如在16位分辨率下,能够检测到最小为0.015°/s的角速度变化,在24位分辨率下更是降低至0.005°/s,这种高精度特性可以让动中通天线在运行过程中时刻保持较高的信号传输、减少了故障和中断的风险。而传统机械传感器精度较低,容易受到震动和颠簸的影响。这不仅提高动中通天线的稳定性和精确性,还降低了人工调整天线指向的频率,降低信号故障或中断的风险,极大地提高了工作效率和运行维护成本。 小巧易集成,低功耗延长设备运行时间 M-G370PDG 惯性测量单元的体积小巧,尺寸仅为5mm3.2mm1.3mm,便于集成到天线系统中。传统机械传感器体积较大,需要额外安装和调整,增加了系统的复杂性。工作电压范围为2.7V至3.6V,兼容多种供电系统,为天线系统提供了稳定的电源保障。在非通信状态下,典型电流消耗为0.9mA,待机电流仅为160μA,休眠电流更是低至3μA,有助于延长天线系统的工作时间,降低运行成本。而传统机械传感器功耗较高,容易影响天线系统的稳定运行。 抗干扰能力强,适用范围广 M-G370PDG 惯性测量单元内置可选择数字滤波器,能够抵抗来自其他电子设备的干扰。在实际应用中,即使在电磁干扰较多的环境中,传感器也能保持准确的姿态和位置测量,确保天线系统的稳定性。而传统机械传感器抗干扰能力较弱,容易受到外界环境的影响。M-G370PDG惯性测量单元适用于各种环境,包括室内、室外、阴雨天气等。而传统机械传感器在恶劣天气条件下性能较差,不适用于户外应用。 综上所述,M-G370PDG惯性测量单元在动中通天线应用中具有明显的优势。它体积小巧,便于集成;具有高精度和稳定性;功耗较低,延长了天线系统的工作时间;抗干扰能力强,适用于各种环境。 关注爱普生电子元器件公众号,获得更多资讯
爱普生电子元器件官方 . 2024-04-22 65
XV7011BB陀螺仪传感器具有出色的零偏稳定性、数字信号,可广泛用于工业场景
陀螺仪传感器作为一种重要的惯性传感器,在航空航天、智能手机与可穿戴设备、工业控制与机器人、汽车行业、医疗仪器等多个领域都有着重要的应用,为这些领域的发展和创新提供了关键支持。 Epson陀螺仪传感器系列以其优异的性能和可靠性著称,新推出的XV7011BB陀螺仪传感器是一种角速度传感器,作为一种石英电子式陀螺仪芯片,具有低功耗、小尺寸和灵活等特点。传感器具有SPI / I2C输出接口,提供高精度的角速度输出(16/24位),以及非常出色的温度零偏稳定性,适用于广泛的工作温度范围(-20°C至+80°C,可选至-40°C至+85°C)。 良好的温漂性能(±1°/s),极大改善了离差 XV7011BB陀螺仪是一种结合了MEMS技术和石英技术的陀螺仪传感器,由爱普生公司专利技术研发,通过将石英置于交流变电场中,当交流变电电场与石英的自然频率匹配时,会产生谐振现象。 传统的MEMS陀螺仪在输出角速度后,需要进行积分才能获取到角度信息。然而,即使在零输入状态下,由于受到温度等因素的影响,传统陀螺仪也会存在一定的输出,这些输出导致在积分过程中会引入累积误差,随着积分时间的增长,误差也会逐渐累积增大。 XV7011BB陀螺仪传感器将石英晶体的温度稳定性与MEMS技术相结合,具有非常优秀的温漂性能(±1°/s),从而大幅改善了误差,实现了在静止状态下仍能保持稳定的角速度输出。优异的温漂性能使得XV7011BB陀螺仪在惯性导航、姿态控制等应用中表现出色。 项目 符号 规格说明 条件 电源电压 VDDM 2.7 to 3.6 V 接口电源电压 VDDI 1.65 V to 3.60 V 温度范围 储存温度 TSTG -40°C to +85°C 工作温度 TOPR -20°C to +80°C 选项:-40°C to +85°C 敏感性 So 280LSB/(°/s) ±5 % 16bit, Ta=+25 °C 71680LSB/(°/s) ±5 % 24bit, Ta=+25 °C 静止的时输出 ZRL ±1 °/s (0 LSB Typ.) Ta=+25 °C 静止的时输出温度特征 ZRLt ±1 °/s Ta = 25°C的变化 检测范围 I ±100°/s 直线性 NI ±0.5 %FS Ta=+25°C 交叉轴 CS ±5 % Ta=+25°C 电流消耗 Iop1 0.9 mA Typ. 和非通信时 待机电流 Iop2 160 µA Typ. 休眠电流 Iop3 3 µA Typ. 噪音 Nd 0.003(°/s)/√Hz at 10 Hz XV7011BB陀螺仪传感器的规格特征 精准的单轴数字输出,满足高要求数据场景 XV7011BB陀螺仪传感器具有SPI / I2C输出接口,提供高精度的角速度输出(16/24位),具有更强的兼容性,为各种应用提供了可靠的数据传输和精准的角速度信息。SPI和I2C是常见的数字接口标准,可与微控制器或其他设备进行通信。传感器通过这些接口提供16位或24位的角速度输出,可以满足对数据精度和准确性要求较高的应用场景。 这种高精度的角速度输出能够帮助用户实现更精准的姿态控制、运动检测、导航定位等功能,提升设备或系统的性能和稳定性。 项目 XV7011BB XV7001BB 角速率输出 16/24位 16位 温度偏差 ±1°/s ±5°/s XV7011BB与XV7001BB陀螺仪传感器的差异比对 应用领域广泛 XV7011BB陀螺仪专为工业应用而设计,在工业领域的抗震和姿态控制方面应用广泛。通过陀螺仪传感器的高精度角速度输出和稳定性,工业设备可以实现更精确的姿态控制,提高生产效率和质量。例如,在机械制造中,陀螺仪可用于控制机器人臂的姿态,确保精准的加工和装配;在航空航天领域,陀螺仪可用于飞行器的姿态控制,提高飞行安全性和稳定性。 XV7011BB陀螺仪在人机接口的运动检测中起着关键作用。通过陀螺仪传感器检测设备的运动和姿态变化,可以实现更加智能化的人机交互体验。例如,在虚拟现实(VR)和增强现实(AR)设备中,陀螺仪可用于跟踪用户头部的运动,实现更沉浸式的虚拟体验;在智能手机和智能手环中,陀螺仪可用于识别用户手势操作,提高用户交互的便利性和体验流畅度。 随着人工智能、物联网等新兴技术的快速发展,陀螺仪传感器的市场需求也将不断增长。作为一种关键的感应器件,EPSON XV7011BB陀螺仪传感器系列不仅在技术水平上处于领先地位,而且在各行业的广泛应用中展现出了卓越的性能和稳定性。 关注爱普生公众号
爱普生电子元器件官方 . 2024-04-22 75

传Arm中国前执行长吴雄昂创立新公司,不少Arm前员工加入
4月22日消息,Arm 中国前执行长吴雄昂成立新公司,试图卷土重来,这次瞄准领域是以前的竞争架构「RISC-V」,据悉已有不少 Arm 前员工进入该公司。 资料显示,「众智齐芯(上海)科技有限公司」开发基于 RISC-V 指令集架构的芯片,背后推手是 Arm 中国前执行长吴雄昂,很可能挑战 Arm 和 Arm 中国。 产业人士透露,这间公司一直在招募 RISC-V 人才,另有传闻称,该公司可能成为 Tenstorrent 的中国代理。 目前有关「众智齐芯」的信息还很少,猜测这边说的芯片很可能是指设计 RISC-V 处理器 IP 和计算平台解决方案的实体,而非微控制器单元。 Arm 中国前执行长吴雄昂(Allen Wu)先前遭到 Arm 指控,涉及利益冲突又散布假消息,还在员工中制造恐慌和困扰,最终被 Arm 中国投票给解雇,但因为吴雄昂拒绝辞职,并宣称握有公司主控权,一度陷入夺权风波,所幸到 2022 年已经解决。 Tenstorrent 主要开发基于 RISC-V 架构的下一代顶尖 AI 芯片,其执行长 Jim Keller 在业界被誉为传奇工程师,如果众智齐芯成为 Tenstorrent 的中国代理,后者将是强大的合作伙伴。也因此,「众智齐芯」的任务可能是吸引客户,了解其需求,再利用 Tenstorrent 技术完成业务,推测「众智齐芯」更可能是合约芯片设计公司,或是一个定制芯片开发商。 据报导,「众智齐芯」成立于 2023 年 9 月 11 日,是间专注于 RISC-V 处理器 IP 和运算平台方案的科技创新企业,拥有产业顶级的 IP 技术开发和商业化经验,并将在各个关键市场与细分领域龙头展开合作,打造开源时代的新处理器 IP 生态。
快讯Arm
芯查查资讯 . 2024-04-22 2 9 1416

中科曙光80岁董事长被立案
4月19日晚间,中科曙光发布关于公司董事收到立案告知书的公告。公告称,中科曙光董事长李国杰于2024年4月19日收到《中国证券监督管理委员会立案告知书》(编号:证监立案字0012024004号),因其涉嫌短线交易中科曙光股票,根据相关法律法规,决定对其立案。截至4月19日收盘,中科曙光股价报44.67元/股,跌幅4.45%。 针对董事长被立案调查,中科曙光称本次事项系对李国杰个人的调查,不会对公司董事会运作及公司日常经营活动产生重大影响,李国杰将积极配合中国证监会的调查工作。公司将持续关注上述事项的进展情况,并按照有关法律、法规的规定履行信息披露义务。 董事长配偶短线交易获利50万元 4月11日,上交所向中科曙光下发监管工作函,就公司董事亲属短线交易事项明确监管要求。 据中科曙光4月12日披露的《关于董事亲属短线交易及致歉的公告》显示,李国杰的配偶张蒂华于2023年3月3日至2024年3月14日期间通过集中竞价交易方式买卖该公司股票。上述交易周期内,张蒂华累计买入中科曙光股票3343296股(141笔),累计成交金额合计约153669067.94元;累计卖出公司股票3342596股(91笔),累计成交金额合计约154417295.06元;扣除交易佣金、印花税等税费后累计收益589779.30元。截至4月12日,张蒂华尚持有该公司股票700股。 根据《证券法》第四十四条的规定:“上市公司、股票在国务院批准的其他全国性证券交易场所交易的公司持有百分之五以上股份的股东、董事、监事、高级管理人员,将其持有的该公司的股票或者其他具有股权性质的证券在买入后六个月内卖出,或者在卖出后六个月内又买入,由此所得收益归该公司所有”。“前款所称董事、监事、高级管理人员、自然人股东持有的股票或者其他具有股权性质的证券,包括其配偶、父母、子女持有的及利用他人账户持有的股票或者其他具有股权性质的证券”。 中科曙光表示,按照规定,张蒂华上述交易构成短线交易,所获收益及后续收益应归公司所有。截至本公告披露日,张蒂华已将本次短线交易所得收益58.98万元全额上交至公司。 中科曙光称,张蒂华未能正确理解短线交易的相关法律、法规规定,不存在主观故意违规情况。其交易期间未征询李国杰意见,亦未告知上述交易行为,系个人根据证券市场已公开的信息并基于个人判断而独立作出的投资行为,李国杰不知悉其证券账户交易情况,不存在因获悉内幕信息而交易公司股票的情形,亦不存在利用内幕信息谋求利益的目的。 中科曙光最后称,张蒂华女士已认识到本次违规交易的严重性,对因本次短线交易行为给市场和投资者带来的不良影响向广大投资者致以诚挚的歉意。李国杰先生对于未能对其亲属及时尽到督促义务、未能及时发现其亲属买卖公司股票深表自责。李国杰先生、张蒂华女士承诺将严格遵守相关法律法规规定。 中科曙光称,公司将以该事件为鉴,要求持股5%以上股东、董事、监事、高级管理人员学习《证券法》《上海证券交易所股票上市规则》《上海证券交易所上市公司自律监管指引第1号——规范运作》等相关法律法规、规范性文件,并将进一步督导全体董事、监事、高级管理人员强化对亲属行为的监督管理,严格遵守相关规定,避免此类事项再次发生。
中科曙光
芯查查资讯 . 2024-04-22 1 5 2025
深度 | 汽车以太网为什么重要?物理层芯片有哪些厂商?
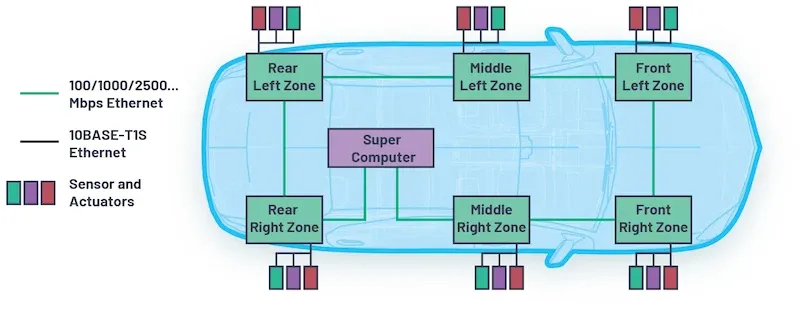
重点内容速览: | 以太网是汽车升级到Zonal架构的关键 | 汽车以太网标准的演进带动物理层芯片使用数量 | 汽车以太网物理层芯片的厂商格局 传统汽车内部通信协议CAN/CAN-FD/CAN-XL/LIN等成熟且成本低,还将在要求不高的设计中被采用,然而,汽车智能化趋势下,汽车以太网(Ethernet)被认为是未来汽车通信架构的首选。 图注:汽车以太网与其他汽车内部通信协议的对比 汽车以太网之所以受到重视,与汽车智能化和自动驾驶技术息息相关。根据芯查查收录报告显示,中国无人驾驶市场以其惊人的年复合增长率接近 30%,在全球无人驾驶技 术发展中占据重要地位。 图注:自动驾驶市场预测(来源于芯查查-报告,更多报告登录网址查看:https://www.xcc.com/news/report) 在这个趋势之下,汽车OEM不仅要开发新的汽车功能,同时保持较低的系统复杂性,因此OEM正在转向新的汽车电子架构,这些架构都依赖于以太网在汽车中的广泛部署,其中一个常被提及的新架构是Zonal。 以太网是汽车升级到Zonal架构的关键 与按功能对汽车器件进行划分的域结构不同,Zonal架构按物理位置对汽车器件进行分组,显著降低系统复杂性。通过对器件进行空间分组,汽车OEM可以减少汽车中ECU和线束布线的数量。 图注:汽车Zonal架构(图源:ADI) Zonal模块通过边缘节点通信网络从各种传感器和ECU传输数据,并通过骨干通信将组合的传感器数据转发到中央计算系统,同时,还将中央计算系统接收的数据传输到各种执行器。中央计算系统和Zonal模块之间的这种双向通信,需要高带宽和低延迟的通信骨干网,处理由多个高级驾驶辅助系统(ADAS)摄像头、汽车运动控制等功能生成的大量数据。 业界普遍认为,以太网是Zonal架构成功的关键,作为一种久经考验的技术,以太网支持可扩展性、多种速度等级和基于服务的架构,还提供完全开发的安全建块。此外,以太网具有定义明确且易于理解的开放系统互连(OSI)模型,可以更轻松地管理汽车网络中的复杂性。 汽车以太网标准的演进带动物理层芯片使用数量 在汽车应用场景中,单双绞线以太网支持10Mbps到10Gbps速度,可以在最远15米距离内通信,足以覆盖汽车中最长的链路。 虽然以太网能够实现极快速度,但这种速度并非在所有情况下都是必需的。例如,车门控制模块或供暖、通风和空调系统通信不需要100Mbps的数据速率;高速率的标准则适用于汇聚摄像头和自动驾驶传感器数据从Zonal模块发送到中央计算系统。此外,10Mbps以太网,甚至是传统的控制器局域网(CAN)等替代网络协议更适合低速和带宽密集度较低的用例。 图注:汽车以太网端口数量将超过100个,将带动物理层芯片使用量。(图源:Ethernet Alliance) 对于先进的汽车智能化功能,还是需要高级的汽车以太网标准,包括100/1000/2500Mbps BASE-T1标准和10BASE-T1S。随着标准向更高级别演进,端口的数量随之增加,以太网联盟Ethernet Alliance预测,未来智能汽车单车以太网端口将超过100个,中国汽车以太网物理层芯片量超过2.9亿片,因为每一个传感器(包括摄像头、激光雷达、毫米波雷达、超声波雷达等)侧都需要部署一个物理层芯片,以连接到ADAS域的交换机上,交换机节点也需要配置若干个物理层芯片。 汽车以太网物理层芯片的厂商格局 汽车以太网电路接口主要由数据链路层(MAC)和物理层(PHY)两部分构成,并且是市场规模或销售额较大的细分领域。设计方案的一个趋势是,目前汽车大部分处理器已包含MAC控制,而以太网物理层芯片作为独立的芯片,用于提供以太网的接入通道,起到连接处理器与通信介质的作用。 就汽车以太网物理层芯片的厂商格局来看,市场份额是海外厂商占大多数,这些厂商拥有突出研发实力和规模化运营能力,并呈现高度集中的市场竞争格局,比较有代表性的为博通、美满电子和瑞昱3家厂商,均属于集成电路设计国际领先企业,资金雄厚、技术领先、客户资源和品牌优势明显,影响着以太网物理层芯片行业的发展方向,市场地位突出。 图注:2020年汽车以太网物理层芯片市场格局(来源:中国汽车技术研究中心有限公司) 国内做汽车以太网物理层芯片的厂商主要是景略半导体和裕太微。景略半导体成立于2009年,总部位于中国上海,景略半导体自2018年战略重组后专注研发以太网通信芯片,开发了高速物理层接口技术,可以满足新一代汽车以太网、工业互联网、企业和数据中心对数据带宽和链接节点数的高速成长需求。 裕太微则是少数实现千兆高端以太网物理层芯片大规模销售的企业,凭借强大的研发设计能力、可靠的产品质量和优质的客户服务,公司产品已成功进入普联、盛科通信、新华三、海康威视等国内众多知名企业的供应链体系,打入被国际巨头长期主导的市场。 图注:汽车千兆以太网物理层芯片的对比(来源:裕太微招股书) 小结 汽车电气化、智能化和网联化推动汽车内部数据传输需求的爆炸性增长,汽车以太网由最初的百兆级别向千兆级别演进,例如支持1000BASE-T1标准的芯片,以满足ADAS、自动驾驶和车载信息娱乐系统等应用的高带宽需求,由此也推动了汽车以太网物理层芯片市场规模不断扩大。 市场中既有国际领先的半导体厂商,比如NXP、德州仪器、英飞凌、Marvell等,也有像景略半导体、裕太微等国内企业积极参与竞争,推出符合车规的汽车以太网物理层芯片产品。随着智能驾驶技术的深入发展,汽车以太网物理层芯片将迎来更广阔的市场空间。
汽车电子
芯查查资讯 . 2024-04-22 5 14 1890
- 1
- 4
- 5
- 6
- 7
- 8
- 500